Stock Market Changes Analyzing Model
 Mohamadreza Bagheri Kabouragh
Mohamadreza Bagheri KabouraghPart One
Models
Deep Learning Model
LSTM
LSTM 2-Path
LSTM Bidirectional
GRU
GRU Bidirectional
GRU 2-Path
Vanilla
Vanilla Bidirectional
Vanilla 2-Path
LSTM Seq2seq
LSTM Bidirectional Seq2seq
LSTM Seq2seq VAE
GRU Seq2seq
GRU Bidirectional Seq2seq
GRU Seq2seq VAE
Attention-is-all-you-Need
CNN-Seq2seq
Dilated-CNN-Seq2seq
1.LSTM
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.LSTMCell(size_layer, state_is_tuple = False)
rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X = tf.placeholder(tf.float32, (None, None, size))
self.Y = tf.placeholder(tf.float32, (None, output_size))
drop = tf.contrib.rnn.DropoutWrapper(
rnn_cells, output_keep_prob = forget_bias
)
self.hidden_layer = tf.placeholder(
tf.float32, (None, num_layers * 2 * size_layer)
)
self.outputs, self.last_state = tf.nn.dynamic_rnn(
drop, self.X, initial_state = self.hidden_layer, dtype = tf.float32
)
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value = np.zeros((1, num_layers * 2 * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state, _, loss = sess.run(
[modelnn.logits, modelnn.last_state, modelnn.optimizer, modelnn.cost],
feed_dict = {
modelnn.X: batch_x,
modelnn.Y: batch_y,
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value = np.zeros((1, num_layers * 2 * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(
df_train.iloc[k : k + timestamp], axis = 0
),
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
output_predict[k + 1 : k + timestamp + 1] = out_logits
if upper_b != df_train.shape[0]:
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(df_train.iloc[upper_b:], axis = 0),
modelnn.hidden_layer: init_value,
},
)
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value = last_state
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(o, axis = 0),
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0812 10:02:17.549519 140290267916096 deprecation.py:323] From <ipython-input-6-d01d21f09afe>:12: LSTMCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.LSTMCell, and will be replaced by that in Tensorflow 2.0.
W0812 10:02:17.551540 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f975091ada0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:02:17.552432 140290267916096 deprecation.py:323] From <ipython-input-6-d01d21f09afe>:16: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0812 10:02:19.808033 140290267916096 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0812 10:02:19.816455 140290267916096 deprecation.py:323] From <ipython-input-6-d01d21f09afe>:27: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0812 10:02:20.147778 140290267916096 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 10:02:20.154457 140290267916096 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:961: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 10:02:20.564182 140290267916096 deprecation.py:323] From <ipython-input-6-d01d21f09afe>:29: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:10<00:00, 4.33it/s, acc=97.2, cost=0.00221]
W0812 10:03:39.929984 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f975091add8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 2
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.33it/s, acc=97.4, cost=0.00193]
W0812 10:04:50.024182 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f974694f240>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 3
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.34it/s, acc=97.2, cost=0.00212]
W0812 10:05:59.904235 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f9746a5af28>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 4
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.30it/s, acc=97.3, cost=0.00195]
W0812 10:07:10.197728 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f9704151390>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 5
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.31it/s, acc=97.2, cost=0.00208]
W0812 10:08:20.024446 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f96b8051f98>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 6
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.31it/s, acc=97.1, cost=0.00224]
W0812 10:09:30.567560 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f96a40a6fd0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 7
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.30it/s, acc=97, cost=0.00229]
W0812 10:10:40.653531 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f968d66ac88>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 8
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.23it/s, acc=97.5, cost=0.00168]
W0812 10:11:50.874499 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f96941b8438>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 9
train loop: 100%|██████████| 300/300 [01:10<00:00, 4.32it/s, acc=97.3, cost=0.00193]
W0812 10:13:01.677561 140290267916096 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f968b7442e8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 10
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.28it/s, acc=97.8, cost=0.00115]
In [10]:
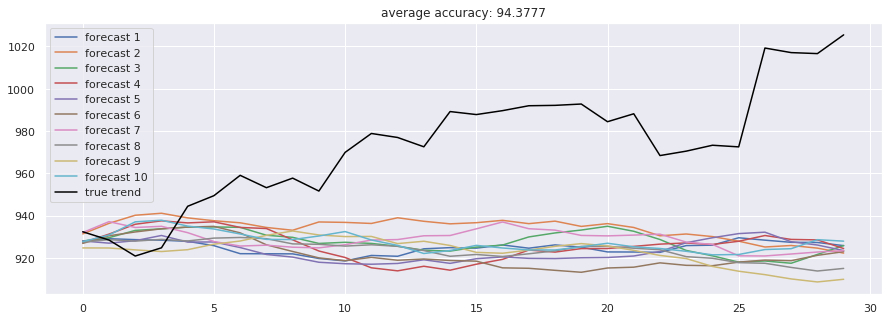
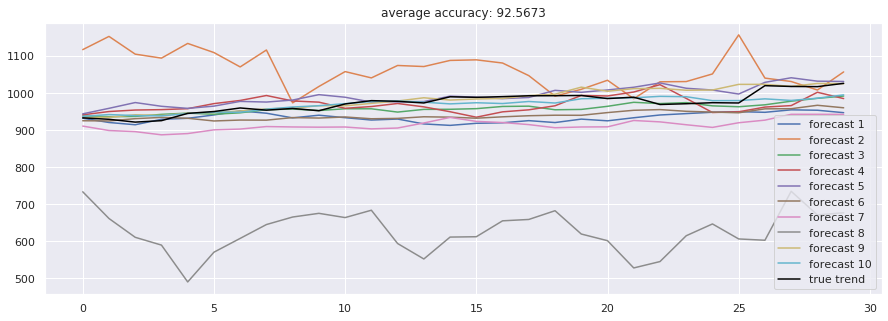
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
2. LSTM 2-Path
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.LSTMCell(size_layer, state_is_tuple = False)
backward_rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
forward_rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X = tf.placeholder(tf.float32, (None, None, size))
self.Y = tf.placeholder(tf.float32, (None, output_size))
drop_backward = tf.contrib.rnn.DropoutWrapper(
backward_rnn_cells, output_keep_prob = forget_bias
)
forward_backward = tf.contrib.rnn.DropoutWrapper(
forward_rnn_cells, output_keep_prob = forget_bias
)
self.backward_hidden_layer = tf.placeholder(
tf.float32, shape = (None, num_layers * 2 * size_layer)
)
self.forward_hidden_layer = tf.placeholder(
tf.float32, shape = (None, num_layers * 2 * size_layer)
)
self.outputs, self.last_state = tf.nn.bidirectional_dynamic_rnn(
forward_backward,
drop_backward,
self.X,
initial_state_fw = self.forward_hidden_layer,
initial_state_bw = self.backward_hidden_layer,
dtype = tf.float32,
)
self.outputs = tf.concat(self.outputs, 2)
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value_forward = np.zeros((1, num_layers * 2 * size_layer))
init_value_backward = np.zeros((1, num_layers * 2 * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state, _, loss = sess.run(
[modelnn.logits, modelnn.last_state, modelnn.optimizer, modelnn.cost],
feed_dict = {
modelnn.X: batch_x,
modelnn.Y: batch_y,
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value_forward = np.zeros((1, num_layers * 2 * size_layer))
init_value_backward = np.zeros((1, num_layers * 2 * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(
df_train.iloc[k : k + timestamp], axis = 0
),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
output_predict[k + 1 : k + timestamp + 1] = out_logits
if upper_b != df_train.shape[0]:
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(df_train.iloc[upper_b:], axis = 0),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value_forward = last_state[0]
init_value_backward = last_state[1]
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(o, axis = 0),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0812 10:20:04.613218 140016646534976 deprecation.py:323] From <ipython-input-6-32a8ad1d5669>:12: LSTMCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.LSTMCell, and will be replaced by that in Tensorflow 2.0.
W0812 10:20:04.617547 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f579b74fd68>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:20:04.620435 140016646534976 deprecation.py:323] From <ipython-input-6-32a8ad1d5669>:16: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
W0812 10:20:04.623959 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f579b6efa20>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 1
W0812 10:20:04.949644 140016646534976 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0812 10:20:04.954938 140016646534976 deprecation.py:323] From <ipython-input-6-32a8ad1d5669>:42: bidirectional_dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.Bidirectional(keras.layers.RNN(cell))`, which is equivalent to this API
W0812 10:20:04.955546 140016646534976 deprecation.py:323] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn.py:464: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0812 10:20:05.149145 140016646534976 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 10:20:05.156026 140016646534976 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:961: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 10:20:05.712592 140016646534976 deprecation.py:323] From <ipython-input-6-32a8ad1d5669>:45: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.04it/s, acc=97.8, cost=0.00113]
W0812 10:21:46.695034 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f58216a3208>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:21:46.695935 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f5790ef9e10>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 2
train loop: 100%|██████████| 300/300 [01:40<00:00, 3.03it/s, acc=97.1, cost=0.00187]
W0812 10:23:27.984155 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f57919d69e8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:23:27.985092 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f57008a7b70>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 3
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.97it/s, acc=97.8, cost=0.00118]
W0812 10:26:50.307250 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f5791f0d2e8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:26:50.308161 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56dbd71160>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 5
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.97it/s, acc=97.1, cost=0.00237]
W0812 10:28:31.638492 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56dbe750b8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:28:31.639337 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d982db38>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 6
train loop: 100%|██████████| 300/300 [01:37<00:00, 3.11it/s, acc=97.5, cost=0.00143]
W0812 10:30:09.934609 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d99130b8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:30:09.935530 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d7b95320>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 7
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.01it/s, acc=97.4, cost=0.00163]
W0812 10:31:50.447502 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d7384cf8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:31:50.448328 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d56a2748>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 8
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.05it/s, acc=96.6, cost=0.00322]
W0812 10:33:30.276075 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d4e9bba8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:33:30.276944 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d2868da0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 9
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.07it/s, acc=97.7, cost=0.00133]
W0812 10:35:09.746517 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d290ccf8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 10:35:09.747369 140016646534976 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f56d03129b0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 10
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.03it/s, acc=97.5, cost=0.00142]
In [10]:
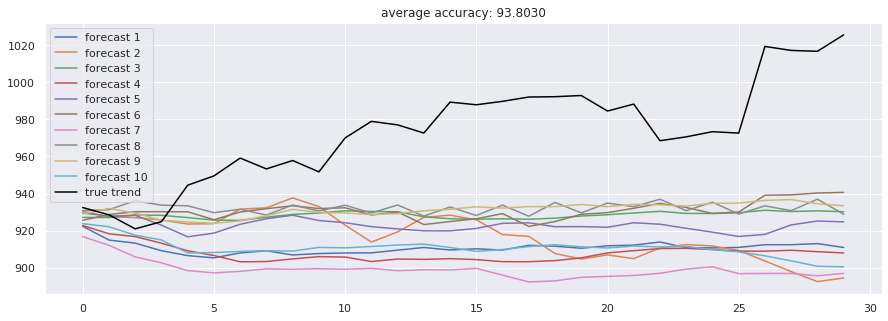
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
3. LSTM 2 Path
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.LSTMCell(size_layer, state_is_tuple = False)
with tf.variable_scope('forward', reuse = False):
rnn_cells_forward = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X_forward = tf.placeholder(tf.float32, (None, None, size))
drop_forward = tf.contrib.rnn.DropoutWrapper(
rnn_cells_forward, output_keep_prob = forget_bias
)
self.hidden_layer_forward = tf.placeholder(
tf.float32, (None, num_layers * 2 * size_layer)
)
self.outputs_forward, self.last_state_forward = tf.nn.dynamic_rnn(
drop_forward,
self.X_forward,
initial_state = self.hidden_layer_forward,
dtype = tf.float32,
)
with tf.variable_scope('backward', reuse = False):
rnn_cells_backward = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X_backward = tf.placeholder(tf.float32, (None, None, size))
drop_backward = tf.contrib.rnn.DropoutWrapper(
rnn_cells_backward, output_keep_prob = forget_bias
)
self.hidden_layer_backward = tf.placeholder(
tf.float32, (None, num_layers * 2 * size_layer)
)
self.outputs_backward, self.last_state_backward = tf.nn.dynamic_rnn(
drop_backward,
self.X_backward,
initial_state = self.hidden_layer_backward,
dtype = tf.float32,
)
self.outputs = self.outputs_backward - self.outputs_forward
self.Y = tf.placeholder(tf.float32, (None, output_size))
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value_forward = np.zeros((1, num_layers * 2 * size_layer))
init_value_backward = np.zeros((1, num_layers * 2 * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x_forward = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[k : index, :].values, axis = 0), axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state_forward, last_state_backward, _, loss = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
modelnn.optimizer,
modelnn.cost,
],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.Y: batch_y,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value_forward = np.zeros((1, num_layers * 2 * size_layer))
init_value_backward = np.zeros((1, num_layers * 2 * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
batch_x_forward = np.expand_dims(
df_train.iloc[k : k + timestamp, :], axis = 0
)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[k : k + timestamp, :].values, axis = 0), axis = 0
)
out_logits, last_state_forward, last_state_backward = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[k + 1 : k + timestamp + 1, :] = out_logits
if upper_b != df_train.shape[0]:
batch_x_forward = np.expand_dims(df_train.iloc[upper_b:, :], axis = 0)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[upper_b:, :].values, axis = 0), axis = 0
)
out_logits, last_state_forward, last_state_backward = sess.run(
[modelnn.logits, modelnn.last_state_forward, modelnn.last_state_backward],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value_forward = last_state_forward
init_value_backward = last_state_backward
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
o_f = np.flip(o, axis = 0)
out_logits, last_state_forward, last_state_backward = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
],
feed_dict = {
modelnn.X_forward: np.expand_dims(o, axis = 0),
modelnn.X_backward: np.expand_dims(o_f, axis = 0),
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0812 16:41:29.569112 139847292135232 deprecation.py:323] From <ipython-input-6-2e28fdecec52>:12: LSTMCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.LSTMCell, and will be replaced by that in Tensorflow 2.0.
W0812 16:41:29.570642 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f302d208da0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:41:29.571565 139847292135232 deprecation.py:323] From <ipython-input-6-2e28fdecec52>:17: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0812 16:41:29.886489 139847292135232 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0812 16:41:29.889781 139847292135232 deprecation.py:323] From <ipython-input-6-2e28fdecec52>:30: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0812 16:41:30.079713 139847292135232 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 16:41:30.086595 139847292135232 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:961: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 16:41:30.565006 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f302d1de6d8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:41:30.647609 139847292135232 deprecation.py:323] From <ipython-input-6-2e28fdecec52>:54: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.02it/s, acc=97.7, cost=0.00132]
W0812 16:43:12.068012 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f3022b11fd0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:43:12.148377 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f30229e3080>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 2
train loop: 100%|██████████| 300/300 [01:40<00:00, 3.02it/s, acc=97.4, cost=0.00157]
W0812 16:44:53.274921 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2fdc217b00>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:44:53.357845 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2fdc1bc0f0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 3
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.98it/s, acc=97.3, cost=0.00171]
W0812 16:46:35.140946 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f847c0240>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:46:35.223572 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f847c00b8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 4
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.00it/s, acc=96.5, cost=0.00334]
W0812 16:48:14.756632 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f843747f0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:48:14.838256 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f722b19e8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 5
train loop: 100%|██████████| 300/300 [01:41<00:00, 2.98it/s, acc=97.9, cost=0.00113]
W0812 16:49:56.968556 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f6bd75b70>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:49:57.051066 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f6bd755f8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 6
train loop: 100%|██████████| 300/300 [01:40<00:00, 3.01it/s, acc=97.7, cost=0.00145]
W0812 16:51:38.877053 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f6a0db3c8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:51:38.959546 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f6976aef0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 7
train loop: 100%|██████████| 300/300 [01:41<00:00, 2.98it/s, acc=97.3, cost=0.00172]
W0812 16:53:21.123231 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f67bdbcc0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:53:21.205539 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f67258e10>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 8
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.06it/s, acc=97.8, cost=0.00117]
W0812 16:55:00.356067 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f65677da0>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:55:00.437367 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f65677898>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 9
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.05it/s, acc=97.7, cost=0.00127]
W0812 16:56:40.365346 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f628e67b8>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
W0812 16:56:40.448274 139847292135232 rnn_cell_impl.py:893] <tensorflow.python.ops.rnn_cell_impl.LSTMCell object at 0x7f2f628e6320>: Using a concatenated state is slower and will soon be deprecated. Use state_is_tuple=True.
simulation 10
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.97it/s, acc=97.2, cost=0.00216]
In [10]:
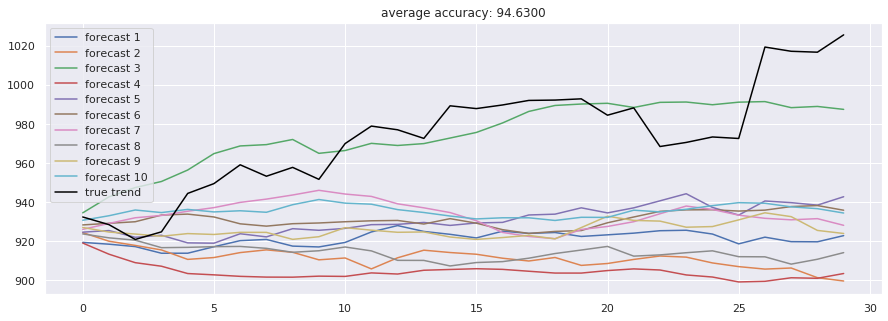
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
4. GRU
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 hours, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.GRUCell(size_layer)
rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X = tf.placeholder(tf.float32, (None, None, size))
self.Y = tf.placeholder(tf.float32, (None, output_size))
drop = tf.contrib.rnn.DropoutWrapper(
rnn_cells, output_keep_prob = forget_bias
)
self.hidden_layer = tf.placeholder(
tf.float32, (None, num_layers * size_layer)
)
self.outputs, self.last_state = tf.nn.dynamic_rnn(
drop, self.X, initial_state = self.hidden_layer, dtype = tf.float32
)
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value = np.zeros((1, num_layers * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state, _, loss = sess.run(
[modelnn.logits, modelnn.last_state, modelnn.optimizer, modelnn.cost],
feed_dict = {
modelnn.X: batch_x,
modelnn.Y: batch_y,
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value = np.zeros((1, num_layers * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(
df_train.iloc[k : k + timestamp], axis = 0
),
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
output_predict[k + 1 : k + timestamp + 1] = out_logits
if upper_b != df_train.shape[0]:
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(df_train.iloc[upper_b:], axis = 0),
modelnn.hidden_layer: init_value,
},
)
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value = last_state
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(o, axis = 0),
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0811 22:46:29.978655 140681713489728 deprecation.py:323] From <ipython-input-6-1b755385b006>:12: GRUCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.GRUCell, and will be replaced by that in Tensorflow 2.0.
W0811 22:46:29.981659 140681713489728 deprecation.py:323] From <ipython-input-6-1b755385b006>:16: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0811 22:46:31.758260 140681713489728 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0811 22:46:31.762153 140681713489728 deprecation.py:323] From <ipython-input-6-1b755385b006>:27: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0811 22:46:32.109607 140681713489728 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0811 22:46:32.121295 140681713489728 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:564: calling Constant.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0811 22:46:32.136707 140681713489728 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:574: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0811 22:46:32.395149 140681713489728 deprecation.py:323] From <ipython-input-6-1b755385b006>:29: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [02:10<00:00, 2.45it/s, acc=97.1, cost=0.00211]
simulation 2
train loop: 100%|██████████| 300/300 [02:09<00:00, 2.48it/s, acc=96.2, cost=0.00432]
simulation 3
train loop: 100%|██████████| 300/300 [02:08<00:00, 1.88it/s, acc=96.7, cost=0.00239]
simulation 4
train loop: 100%|██████████| 300/300 [02:05<00:00, 2.12it/s, acc=96.4, cost=0.00307]
simulation 5
train loop: 100%|██████████| 300/300 [02:12<00:00, 1.95it/s, acc=96.9, cost=0.00227]
simulation 6
train loop: 100%|██████████| 300/300 [02:15<00:00, 2.64it/s, acc=96.4, cost=0.00318]
simulation 7
train loop: 100%|██████████| 300/300 [02:10<00:00, 2.59it/s, acc=96.9, cost=0.00256]
simulation 8
train loop: 100%|██████████| 300/300 [02:11<00:00, 2.19it/s, acc=97.2, cost=0.00188]
simulation 9
train loop: 100%|██████████| 300/300 [02:14<00:00, 2.48it/s, acc=96.9, cost=0.00226]
simulation 10
train loop: 100%|██████████| 300/300 [02:06<00:00, 2.48it/s, acc=97.5, cost=0.00167]
In [10]:
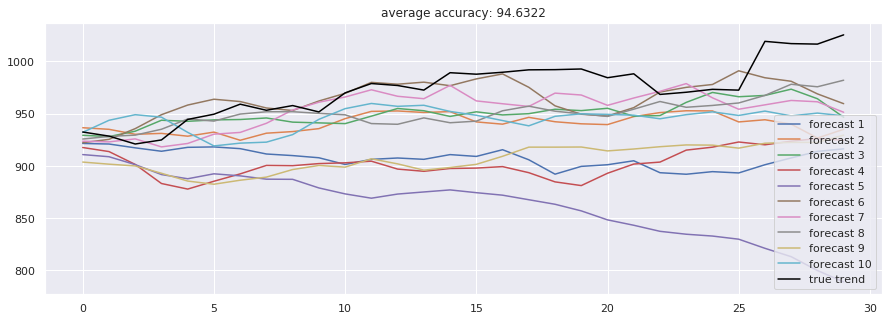
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
5. GRU Bidirectional
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.GRUCell(size_layer)
backward_rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
forward_rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X = tf.placeholder(tf.float32, (None, None, size))
self.Y = tf.placeholder(tf.float32, (None, output_size))
drop_backward = tf.contrib.rnn.DropoutWrapper(
backward_rnn_cells, output_keep_prob = forget_bias
)
forward_backward = tf.contrib.rnn.DropoutWrapper(
forward_rnn_cells, output_keep_prob = forget_bias
)
self.backward_hidden_layer = tf.placeholder(
tf.float32, shape = (None, num_layers * size_layer)
)
self.forward_hidden_layer = tf.placeholder(
tf.float32, shape = (None, num_layers * size_layer)
)
self.outputs, self.last_state = tf.nn.bidirectional_dynamic_rnn(
forward_backward,
drop_backward,
self.X,
initial_state_fw = self.forward_hidden_layer,
initial_state_bw = self.backward_hidden_layer,
dtype = tf.float32,
)
self.outputs = tf.concat(self.outputs, 2)
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state, _, loss = sess.run(
[modelnn.logits, modelnn.last_state, modelnn.optimizer, modelnn.cost],
feed_dict = {
modelnn.X: batch_x,
modelnn.Y: batch_y,
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(
df_train.iloc[k : k + timestamp], axis = 0
),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
output_predict[k + 1 : k + timestamp + 1] = out_logits
if upper_b != df_train.shape[0]:
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(df_train.iloc[upper_b:], axis = 0),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value_forward = last_state[0]
init_value_backward = last_state[1]
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(o, axis = 0),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0812 17:04:18.991346 140383403915072 deprecation.py:323] From <ipython-input-6-5c392a5d20ef>:12: GRUCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.GRUCell, and will be replaced by that in Tensorflow 2.0.
W0812 17:04:18.995361 140383403915072 deprecation.py:323] From <ipython-input-6-5c392a5d20ef>:16: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0812 17:04:19.316777 140383403915072 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0812 17:04:19.322190 140383403915072 deprecation.py:323] From <ipython-input-6-5c392a5d20ef>:42: bidirectional_dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.Bidirectional(keras.layers.RNN(cell))`, which is equivalent to this API
W0812 17:04:19.322940 140383403915072 deprecation.py:323] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn.py:464: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0812 17:04:19.515542 140383403915072 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 17:04:19.522486 140383403915072 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:564: calling Constant.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 17:04:19.531559 140383403915072 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:574: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 17:04:19.763414 140383403915072 deprecation.py:323] From <ipython-input-6-5c392a5d20ef>:45: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.98it/s, acc=97.1, cost=0.00199]
simulation 2
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.02it/s, acc=76.2, cost=0.139]
simulation 3
train loop: 100%|██████████| 300/300 [01:40<00:00, 3.00it/s, acc=97.1, cost=0.00205]
simulation 4
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.99it/s, acc=95.3, cost=0.00587]
simulation 5
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.97it/s, acc=96.2, cost=0.00386]
simulation 6
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.99it/s, acc=97.1, cost=0.00196]
simulation 7
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.98it/s, acc=96.7, cost=0.0032]
simulation 8
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.00it/s, acc=85.2, cost=0.0599]
simulation 9
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.99it/s, acc=97.6, cost=0.00142]
simulation 10
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.03it/s, acc=97.7, cost=0.00138]
In [10]:
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
6. GRU 2-Path
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.GRUCell(size_layer)
with tf.variable_scope('forward', reuse = False):
rnn_cells_forward = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X_forward = tf.placeholder(tf.float32, (None, None, size))
drop_forward = tf.contrib.rnn.DropoutWrapper(
rnn_cells_forward, output_keep_prob = forget_bias
)
self.hidden_layer_forward = tf.placeholder(
tf.float32, (None, num_layers * size_layer)
)
self.outputs_forward, self.last_state_forward = tf.nn.dynamic_rnn(
drop_forward,
self.X_forward,
initial_state = self.hidden_layer_forward,
dtype = tf.float32,
)
with tf.variable_scope('backward', reuse = False):
rnn_cells_backward = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X_backward = tf.placeholder(tf.float32, (None, None, size))
drop_backward = tf.contrib.rnn.DropoutWrapper(
rnn_cells_backward, output_keep_prob = forget_bias
)
self.hidden_layer_backward = tf.placeholder(
tf.float32, (None, num_layers * size_layer)
)
self.outputs_backward, self.last_state_backward = tf.nn.dynamic_rnn(
drop_backward,
self.X_backward,
initial_state = self.hidden_layer_backward,
dtype = tf.float32,
)
self.outputs = self.outputs_backward - self.outputs_forward
self.Y = tf.placeholder(tf.float32, (None, output_size))
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x_forward = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[k : index, :].values, axis = 0), axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state_forward, last_state_backward, _, loss = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
modelnn.optimizer,
modelnn.cost,
],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.Y: batch_y,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
batch_x_forward = np.expand_dims(
df_train.iloc[k : k + timestamp, :], axis = 0
)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[k : k + timestamp, :].values, axis = 0), axis = 0
)
out_logits, last_state_forward, last_state_backward = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[k + 1 : k + timestamp + 1, :] = out_logits
if upper_b != df_train.shape[0]:
batch_x_forward = np.expand_dims(df_train.iloc[upper_b:, :], axis = 0)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[upper_b:, :].values, axis = 0), axis = 0
)
out_logits, last_state_forward, last_state_backward = sess.run(
[modelnn.logits, modelnn.last_state_forward, modelnn.last_state_backward],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value_forward = last_state_forward
init_value_backward = last_state_backward
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
o_f = np.flip(o, axis = 0)
out_logits, last_state_forward, last_state_backward = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
],
feed_dict = {
modelnn.X_forward: np.expand_dims(o, axis = 0),
modelnn.X_backward: np.expand_dims(o_f, axis = 0),
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0812 17:35:02.847837 140485361571648 deprecation.py:323] From <ipython-input-6-0ad5fabb14ba>:12: GRUCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.GRUCell, and will be replaced by that in Tensorflow 2.0.
W0812 17:35:02.849749 140485361571648 deprecation.py:323] From <ipython-input-6-0ad5fabb14ba>:17: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0812 17:35:03.166620 140485361571648 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0812 17:35:03.169869 140485361571648 deprecation.py:323] From <ipython-input-6-0ad5fabb14ba>:30: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0812 17:35:03.361743 140485361571648 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 17:35:03.368463 140485361571648 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:564: calling Constant.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 17:35:03.377521 140485361571648 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:574: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 17:35:03.612136 140485361571648 deprecation.py:323] From <ipython-input-6-0ad5fabb14ba>:54: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.04it/s, acc=97.5, cost=0.00174]
simulation 2
train loop: 100%|██████████| 300/300 [01:39<00:00, 3.01it/s, acc=96.7, cost=0.00259]
simulation 3
train loop: 100%|██████████| 300/300 [01:39<00:00, 2.99it/s, acc=97.4, cost=0.00178]
simulation 4
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.05it/s, acc=96.2, cost=0.00314]
simulation 5
train loop: 100%|██████████| 300/300 [01:40<00:00, 2.99it/s, acc=97.4, cost=0.00166]
simulation 6
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.02it/s, acc=97.3, cost=0.00162]
simulation 7
train loop: 100%|██████████| 300/300 [01:40<00:00, 3.00it/s, acc=96.1, cost=0.00347]
simulation 8
train loop: 100%|██████████| 300/300 [01:40<00:00, 3.01it/s, acc=96.1, cost=0.004]
simulation 9
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.05it/s, acc=95.3, cost=0.00537]
simulation 10
train loop: 100%|██████████| 300/300 [01:38<00:00, 3.05it/s, acc=97.1, cost=0.00213]
In [10]:
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()

7. Vanilla
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 hours, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.BasicRNNCell(size_layer)
rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X = tf.placeholder(tf.float32, (None, None, size))
self.Y = tf.placeholder(tf.float32, (None, output_size))
drop = tf.contrib.rnn.DropoutWrapper(
rnn_cells, output_keep_prob = forget_bias
)
self.hidden_layer = tf.placeholder(
tf.float32, (None, num_layers * size_layer)
)
self.outputs, self.last_state = tf.nn.dynamic_rnn(
drop, self.X, initial_state = self.hidden_layer, dtype = tf.float32
)
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value = np.zeros((1, num_layers * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state, _, loss = sess.run(
[modelnn.logits, modelnn.last_state, modelnn.optimizer, modelnn.cost],
feed_dict = {
modelnn.X: batch_x,
modelnn.Y: batch_y,
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value = np.zeros((1, num_layers * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(
df_train.iloc[k : k + timestamp], axis = 0
),
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
output_predict[k + 1 : k + timestamp + 1] = out_logits
if upper_b != df_train.shape[0]:
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(df_train.iloc[upper_b:], axis = 0),
modelnn.hidden_layer: init_value,
},
)
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value = last_state
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(o, axis = 0),
modelnn.hidden_layer: init_value,
},
)
init_value = last_state
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0812 22:23:09.113305 140115879184192 deprecation.py:323] From <ipython-input-6-35b560f11ea1>:12: BasicRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.SimpleRNNCell, and will be replaced by that in Tensorflow 2.0.
W0812 22:23:09.116059 140115879184192 deprecation.py:323] From <ipython-input-6-35b560f11ea1>:16: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0812 22:23:09.445186 140115879184192 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0812 22:23:09.448605 140115879184192 deprecation.py:323] From <ipython-input-6-35b560f11ea1>:27: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0812 22:23:09.640925 140115879184192 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 22:23:09.647897 140115879184192 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:459: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0812 22:23:09.740828 140115879184192 deprecation.py:323] From <ipython-input-6-35b560f11ea1>:29: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [00:52<00:00, 5.77it/s, acc=76.9, cost=0.129]
simulation 2
train loop: 100%|██████████| 300/300 [00:49<00:00, 6.03it/s, acc=78, cost=0.11]
simulation 3
train loop: 100%|██████████| 300/300 [00:52<00:00, 5.77it/s, acc=73.7, cost=0.154]
simulation 4
train loop: 100%|██████████| 300/300 [00:50<00:00, 6.11it/s, acc=82.7, cost=0.075]
simulation 5
train loop: 100%|██████████| 300/300 [00:52<00:00, 5.65it/s, acc=76.3, cost=0.12]
simulation 6
train loop: 100%|██████████| 300/300 [00:48<00:00, 6.15it/s, acc=77, cost=0.123]
simulation 7
train loop: 100%|██████████| 300/300 [00:52<00:00, 5.65it/s, acc=80.2, cost=0.0896]
simulation 8
train loop: 100%|██████████| 300/300 [00:50<00:00, 5.99it/s, acc=75.1, cost=0.15]
simulation 9
train loop: 100%|██████████| 300/300 [00:52<00:00, 5.58it/s, acc=87.2, cost=0.0367]
simulation 10
train loop: 100%|██████████| 300/300 [00:52<00:00, 5.69it/s, acc=76.7, cost=0.121]
In [10]:
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
Bidirectional Vanilla
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.BasicRNNCell(size_layer)
backward_rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
forward_rnn_cells = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X = tf.placeholder(tf.float32, (None, None, size))
self.Y = tf.placeholder(tf.float32, (None, output_size))
drop_backward = tf.contrib.rnn.DropoutWrapper(
backward_rnn_cells, output_keep_prob = forget_bias
)
forward_backward = tf.contrib.rnn.DropoutWrapper(
forward_rnn_cells, output_keep_prob = forget_bias
)
self.backward_hidden_layer = tf.placeholder(
tf.float32, shape = (None, num_layers * size_layer)
)
self.forward_hidden_layer = tf.placeholder(
tf.float32, shape = (None, num_layers * size_layer)
)
self.outputs, self.last_state = tf.nn.bidirectional_dynamic_rnn(
forward_backward,
drop_backward,
self.X,
initial_state_fw = self.forward_hidden_layer,
initial_state_bw = self.backward_hidden_layer,
dtype = tf.float32,
)
self.outputs = tf.concat(self.outputs, 2)
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state, _, loss = sess.run(
[modelnn.logits, modelnn.last_state, modelnn.optimizer, modelnn.cost],
feed_dict = {
modelnn.X: batch_x,
modelnn.Y: batch_y,
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(
df_train.iloc[k : k + timestamp], axis = 0
),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
output_predict[k + 1 : k + timestamp + 1] = out_logits
if upper_b != df_train.shape[0]:
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(df_train.iloc[upper_b:], axis = 0),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value_forward = last_state[0]
init_value_backward = last_state[1]
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
out_logits, last_state = sess.run(
[modelnn.logits, modelnn.last_state],
feed_dict = {
modelnn.X: np.expand_dims(o, axis = 0),
modelnn.backward_hidden_layer: init_value_backward,
modelnn.forward_hidden_layer: init_value_forward,
},
)
init_value_forward = last_state[0]
init_value_backward = last_state[1]
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0813 00:50:36.840563 140096227489600 deprecation.py:323] From <ipython-input-6-c6fe3802893b>:12: BasicRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.SimpleRNNCell, and will be replaced by that in Tensorflow 2.0.
W0813 00:50:36.842919 140096227489600 deprecation.py:323] From <ipython-input-6-c6fe3802893b>:16: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0813 00:50:37.159364 140096227489600 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0813 00:50:37.164350 140096227489600 deprecation.py:323] From <ipython-input-6-c6fe3802893b>:42: bidirectional_dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.Bidirectional(keras.layers.RNN(cell))`, which is equivalent to this API
W0813 00:50:37.165004 140096227489600 deprecation.py:323] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn.py:464: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0813 00:50:37.355312 140096227489600 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0813 00:50:37.362000 140096227489600 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:459: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0813 00:50:37.520977 140096227489600 deprecation.py:323] From <ipython-input-6-c6fe3802893b>:45: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:04<00:00, 4.68it/s, acc=71.9, cost=0.169]
simulation 2
train loop: 100%|██████████| 300/300 [01:06<00:00, 4.45it/s, acc=77.7, cost=0.11]
simulation 3
train loop: 100%|██████████| 300/300 [01:04<00:00, 4.67it/s, acc=68.9, cost=0.211]
simulation 4
train loop: 100%|██████████| 300/300 [01:06<00:00, 4.45it/s, acc=78.9, cost=0.104]
simulation 5
train loop: 100%|██████████| 300/300 [01:06<00:00, 4.53it/s, acc=70.2, cost=0.193]
simulation 6
train loop: 100%|██████████| 300/300 [01:06<00:00, 4.57it/s, acc=70.6, cost=0.189]
simulation 7
train loop: 100%|██████████| 300/300 [01:07<00:00, 4.43it/s, acc=66.1, cost=0.253]
simulation 8
train loop: 100%|██████████| 300/300 [01:05<00:00, 4.53it/s, acc=80.6, cost=0.0892]
simulation 9
train loop: 100%|██████████| 300/300 [01:07<00:00, 4.51it/s, acc=63.5, cost=0.287]
simulation 10
train loop: 100%|██████████| 300/300 [01:03<00:00, 4.71it/s, acc=72.8, cost=0.167]
In [10]:
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()
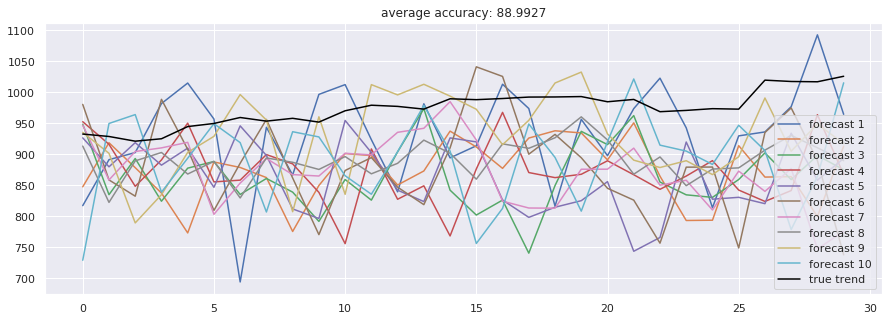
Vanilla 2 path
import sys
import warnings
if not sys.warnoptions:
warnings.simplefilter('ignore')
In [2]:
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
from sklearn.preprocessing import MinMaxScaler
from datetime import datetime
from datetime import timedelta
from tqdm import tqdm
sns.set()
tf.compat.v1.random.set_random_seed(1234)
In [3]:
df = pd.read_csv('../dataset/GOOG-year.csv')
df.head()
Out[3]:
| Date | Open | High | Low | Close | Adj Close | Volume | |
| 0 | 2016-11-02 | 778.200012 | 781.650024 | 763.450012 | 768.700012 | 768.700012 | 1872400 |
| 1 | 2016-11-03 | 767.250000 | 769.950012 | 759.030029 | 762.130005 | 762.130005 | 1943200 |
| 2 | 2016-11-04 | 750.659973 | 770.359985 | 750.560974 | 762.020020 | 762.020020 | 2134800 |
| 3 | 2016-11-07 | 774.500000 | 785.190002 | 772.549988 | 782.520020 | 782.520020 | 1585100 |
| 4 | 2016-11-08 | 783.400024 | 795.632996 | 780.190002 | 790.510010 | 790.510010 | 1350800 |
In [4]:
minmax = MinMaxScaler().fit(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = minmax.transform(df.iloc[:, 4:5].astype('float32')) # Close index
df_log = pd.DataFrame(df_log)
df_log.head()
Out[4]:
| 0 | |
| 0 | 0.112708 |
| 1 | 0.090008 |
| 2 | 0.089628 |
| 3 | 0.160459 |
| 4 | 0.188066 |
Split train and test
I will cut the dataset to train and test datasets,
Train dataset derived from starting timestamp until last 30 days
Test dataset derived from last 30 days until end of the dataset
So we will let the model do forecasting based on last 30 days, and we will going to repeat the experiment for 10 times. You can increase it locally if you want, and tuning parameters will help you by a lot.
In [5]:
test_size = 30
simulation_size = 10
df_train = df_log.iloc[:-test_size]
df_test = df_log.iloc[-test_size:]
df.shape, df_train.shape, df_test.shape
Out[5]:
((252, 7), (222, 1), (30, 1))
In [6]:
class Model:
def __init__(
self,
learning_rate,
num_layers,
size,
size_layer,
output_size,
forget_bias = 0.1,
):
def lstm_cell(size_layer):
return tf.nn.rnn_cell.BasicRNNCell(size_layer)
with tf.variable_scope('forward', reuse = False):
rnn_cells_forward = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X_forward = tf.placeholder(tf.float32, (None, None, size))
drop_forward = tf.contrib.rnn.DropoutWrapper(
rnn_cells_forward, output_keep_prob = forget_bias
)
self.hidden_layer_forward = tf.placeholder(
tf.float32, (None, num_layers * size_layer)
)
self.outputs_forward, self.last_state_forward = tf.nn.dynamic_rnn(
drop_forward,
self.X_forward,
initial_state = self.hidden_layer_forward,
dtype = tf.float32,
)
with tf.variable_scope('backward', reuse = False):
rnn_cells_backward = tf.nn.rnn_cell.MultiRNNCell(
[lstm_cell(size_layer) for _ in range(num_layers)],
state_is_tuple = False,
)
self.X_backward = tf.placeholder(tf.float32, (None, None, size))
drop_backward = tf.contrib.rnn.DropoutWrapper(
rnn_cells_backward, output_keep_prob = forget_bias
)
self.hidden_layer_backward = tf.placeholder(
tf.float32, (None, num_layers * size_layer)
)
self.outputs_backward, self.last_state_backward = tf.nn.dynamic_rnn(
drop_backward,
self.X_backward,
initial_state = self.hidden_layer_backward,
dtype = tf.float32,
)
self.outputs = self.outputs_backward - self.outputs_forward
self.Y = tf.placeholder(tf.float32, (None, output_size))
self.logits = tf.layers.dense(self.outputs[-1], output_size)
self.cost = tf.reduce_mean(tf.square(self.Y - self.logits))
self.optimizer = tf.train.AdamOptimizer(learning_rate).minimize(
self.cost
)
def calculate_accuracy(real, predict):
real = np.array(real) + 1
predict = np.array(predict) + 1
percentage = 1 - np.sqrt(np.mean(np.square((real - predict) / real)))
return percentage * 100
def anchor(signal, weight):
buffer = []
last = signal[0]
for i in signal:
smoothed_val = last * weight + (1 - weight) * i
buffer.append(smoothed_val)
last = smoothed_val
return buffer
In [7]:
num_layers = 1
size_layer = 128
timestamp = 5
epoch = 300
dropout_rate = 0.8
future_day = test_size
learning_rate = 0.01
In [8]:
def forecast():
tf.reset_default_graph()
modelnn = Model(
learning_rate, num_layers, df_log.shape[1], size_layer, df_log.shape[1], dropout_rate
)
sess = tf.InteractiveSession()
sess.run(tf.global_variables_initializer())
date_ori = pd.to_datetime(df.iloc[:, 0]).tolist()
pbar = tqdm(range(epoch), desc = 'train loop')
for i in pbar:
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
total_loss, total_acc = [], []
for k in range(0, df_train.shape[0] - 1, timestamp):
index = min(k + timestamp, df_train.shape[0] - 1)
batch_x_forward = np.expand_dims(
df_train.iloc[k : index, :].values, axis = 0
)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[k : index, :].values, axis = 0), axis = 0
)
batch_y = df_train.iloc[k + 1 : index + 1, :].values
logits, last_state_forward, last_state_backward, _, loss = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
modelnn.optimizer,
modelnn.cost,
],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.Y: batch_y,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
total_loss.append(loss)
total_acc.append(calculate_accuracy(batch_y[:, 0], logits[:, 0]))
pbar.set_postfix(cost = np.mean(total_loss), acc = np.mean(total_acc))
future_day = test_size
output_predict = np.zeros((df_train.shape[0] + future_day, df_train.shape[1]))
output_predict[0] = df_train.iloc[0]
upper_b = (df_train.shape[0] // timestamp) * timestamp
init_value_forward = np.zeros((1, num_layers * size_layer))
init_value_backward = np.zeros((1, num_layers * size_layer))
for k in range(0, (df_train.shape[0] // timestamp) * timestamp, timestamp):
batch_x_forward = np.expand_dims(
df_train.iloc[k : k + timestamp, :], axis = 0
)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[k : k + timestamp, :].values, axis = 0), axis = 0
)
out_logits, last_state_forward, last_state_backward = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[k + 1 : k + timestamp + 1, :] = out_logits
if upper_b != df_train.shape[0]:
batch_x_forward = np.expand_dims(df_train.iloc[upper_b:, :], axis = 0)
batch_x_backward = np.expand_dims(
np.flip(df_train.iloc[upper_b:, :].values, axis = 0), axis = 0
)
out_logits, last_state_forward, last_state_backward = sess.run(
[modelnn.logits, modelnn.last_state_forward, modelnn.last_state_backward],
feed_dict = {
modelnn.X_forward: batch_x_forward,
modelnn.X_backward: batch_x_backward,
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[upper_b + 1 : df_train.shape[0] + 1] = out_logits
future_day -= 1
date_ori.append(date_ori[-1] + timedelta(days = 1))
init_value_forward = last_state_forward
init_value_backward = last_state_backward
for i in range(future_day):
o = output_predict[-future_day - timestamp + i:-future_day + i]
o_f = np.flip(o, axis = 0)
out_logits, last_state_forward, last_state_backward = sess.run(
[
modelnn.logits,
modelnn.last_state_forward,
modelnn.last_state_backward,
],
feed_dict = {
modelnn.X_forward: np.expand_dims(o, axis = 0),
modelnn.X_backward: np.expand_dims(o_f, axis = 0),
modelnn.hidden_layer_forward: init_value_forward,
modelnn.hidden_layer_backward: init_value_backward,
},
)
init_value_forward = last_state_forward
init_value_backward = last_state_backward
output_predict[-future_day + i] = out_logits[-1]
date_ori.append(date_ori[-1] + timedelta(days = 1))
output_predict = minmax.inverse_transform(output_predict)
deep_future = anchor(output_predict[:, 0], 0.3)
return deep_future[-test_size:]
In [9]:
results = []
for i in range(simulation_size):
print('simulation %d'%(i + 1))
results.append(forecast())
WARNING: Logging before flag parsing goes to stderr.
W0813 01:22:40.361487 140690772289344 deprecation.py:323] From <ipython-input-6-04b2b1d463f4>:12: BasicRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.SimpleRNNCell, and will be replaced by that in Tensorflow 2.0.
W0813 01:22:40.364087 140690772289344 deprecation.py:323] From <ipython-input-6-04b2b1d463f4>:17: MultiRNNCell.__init__ (from tensorflow.python.ops.rnn_cell_impl) is deprecated and will be removed in a future version.
Instructions for updating:
This class is equivalent as tf.keras.layers.StackedRNNCells, and will be replaced by that in Tensorflow 2.0.
simulation 1
W0813 01:22:40.688215 140690772289344 lazy_loader.py:50]
The TensorFlow contrib module will not be included in TensorFlow 2.0.
For more information, please see:
* https://github.com/tensorflow/community/blob/master/rfcs/20180907-contrib-sunset.md
* https://github.com/tensorflow/addons
* https://github.com/tensorflow/io (for I/O related ops)
If you depend on functionality not listed there, please file an issue.
W0813 01:22:40.691791 140690772289344 deprecation.py:323] From <ipython-input-6-04b2b1d463f4>:30: dynamic_rnn (from tensorflow.python.ops.rnn) is deprecated and will be removed in a future version.
Instructions for updating:
Please use `keras.layers.RNN(cell)`, which is equivalent to this API
W0813 01:22:40.883351 140690772289344 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0813 01:22:40.890208 140690772289344 deprecation.py:506] From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/rnn_cell_impl.py:459: calling Zeros.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
W0813 01:22:41.052329 140690772289344 deprecation.py:323] From <ipython-input-6-04b2b1d463f4>:54: dense (from tensorflow.python.layers.core) is deprecated and will be removed in a future version.
Instructions for updating:
Use keras.layers.dense instead.
train loop: 100%|██████████| 300/300 [01:08<00:00, 4.43it/s, acc=73.8, cost=0.155]
simulation 2
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.32it/s, acc=75, cost=0.151]
simulation 3
train loop: 100%|██████████| 300/300 [01:08<00:00, 4.41it/s, acc=75.2, cost=0.14]
simulation 4
train loop: 100%|██████████| 300/300 [01:08<00:00, 4.36it/s, acc=71, cost=0.186]
simulation 5
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.33it/s, acc=84, cost=0.0574]
simulation 6
train loop: 100%|██████████| 300/300 [01:09<00:00, 4.34it/s, acc=72.3, cost=0.166]
simulation 7
train loop: 100%|██████████| 300/300 [01:08<00:00, 4.44it/s, acc=80.4, cost=0.0918]
simulation 8
train loop: 100%|██████████| 300/300 [01:07<00:00, 4.45it/s, acc=79.7, cost=0.101]
simulation 9
train loop: 100%|██████████| 300/300 [01:05<00:00, 4.61it/s, acc=80.6, cost=0.088]
simulation 10
train loop: 100%|██████████| 300/300 [01:08<00:00, 4.40it/s, acc=70.8, cost=0.194]
In [10]:
accuracies = [calculate_accuracy(df['Close'].iloc[-test_size:].values, r) for r in results]
plt.figure(figsize = (15, 5))
for no, r in enumerate(results):
plt.plot(r, label = 'forecast %d'%(no + 1))
plt.plot(df['Close'].iloc[-test_size:].values, label = 'true trend', c = 'black')
plt.legend()
plt.title('average accuracy: %.4f'%(np.mean(accuracies)))
plt.show()

Subscribe to my newsletter
Read articles from Mohamadreza Bagheri Kabouragh directly inside your inbox. Subscribe to the newsletter, and don't miss out.
Written by