Human Robot Interaction
 Stinu Rabin
Stinu Rabin
Hi everyone, back with a good blog post after a while. You know, I started looking for internship and decided to get into professional life, feeling older day by day :) Creating a customised resume and looking through various companies may seem simple at first, but as you read through the job descriptions, you'll see how important it is to "develop your skills." Full stop, getting in to the topic. Today, while looking for an internship, I discovered the topic for my blog, "Human Robot Interaction." I simply wanted to learn more about this and share what I knew. Below includes a summary of a research paper I've read about HRI.
"Learning happens just by Researching", yes it's true. For me, learning about the concept of "HRI" and getting involved in robotics projects is a learning process as well . "NICO" is one of those projects.
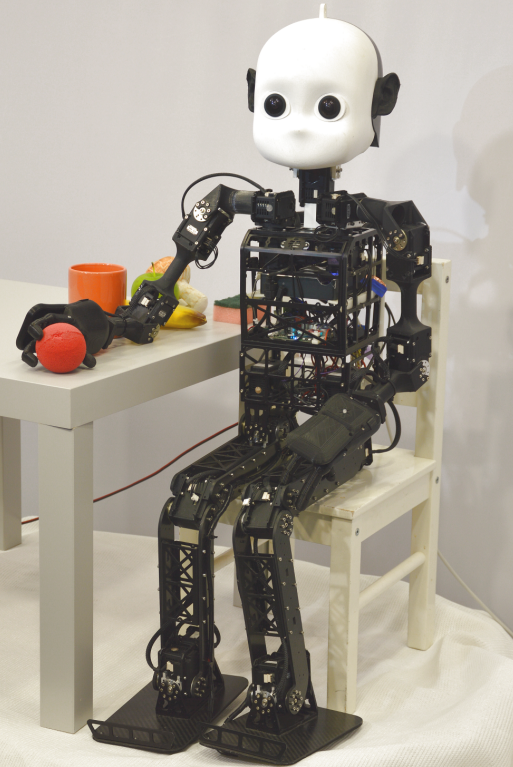
NICO - Neuro-Inspired COmpanion
The humanoid robot project is getting more familiar in the HRI field. One of the robots is "NICO" (Neuro Inspired Companion).The goal of the NICO (Neuro-Inspired COmpanion) project is to create a robotic system based on ideas from cognitive science and neuroscience. The term "neuro-inspired" describes a design that represents biological principles present in the human nervous system and brain. Let's dive a bit in to Cognitive Development in Robots, because it enables Robot to learn, interact, collabrate..
Cognitive Development:
For making a Humanoid Robot, the very first important principle is " Cognitive Development". So what's Cognitive Development? Imagine teaching a kid to sit, stand, walk, speak etc.. Just like a Kid, Robots start to learn basic skills and then develop complex skills. In simple terms, cognitive development is like teaching a robot to think like a human. It's about giving robots the ability to learn, adapt, and interact with the world. This involves the below steps:
1.Reflex:
- This stage involves simple, automatic reactions without thinking. like, when you touch something hot, you instantly pull your hand away without deciding to do so.
2. Sensorimotor Mapping:
Imagine people searching for their Leg before walking, funny right? So if it's a Humanoid Robot, then this is absolutely important. It's like having a picture of your body and understanding how you can move your arms, legs, and other parts without needing to look at them, which is the basic quality of a Human.
Understanding your surroundings: It's knowing where things are around you without having to constantly look. Just the place where you are living in.
3. Perception:
- Perception allows to make sense of the world around and interact with it in a meaningful way. In Humans, perception begins with eyes, ears and skin. Likewise, in Robots, perception begins with cameras, sensors, lidar, microphone. For identifying, classifying objects a Robot uses Camera by using more methods like Object recognition etc. So, in short perception is just gathering,organising and to interpret the Information, which can be used in more meaningful way.
4. Voluntary Motion:
- This stage involves deciding and executing movements. It's when you choose to move, like reaching for a glass of water when you're thirsty.
5. Higher Order Cognition:
- This stage refers to advanced thinking processes, like problem-solving, planning, reasoning, and decision-making. It's the higher-level thinking beyond just moving and reacting, involving more complex functions.
Too much definitions...So, discussing about Humanoid Robots, did you know that there are many varieties of Humanoid Robots? Overall, humanoid robots can be grouped into three categories.
1) Semi-humanoids or service robots
2) Small humanoids have a size of about 50cm.
3) Medium-size humanoids have a size of up to approx. 150cm height.
"Just search for the term "robotics" and you'll fall in love, I promise."
Alright, let's go back to the vareity of Humanoids. First about the Small Humanoids or Service Robots:
Imagine, learning a new Language and you've got no partners to develop your Language skills.Furhat comes into play here. Furhat is a Small Humanoid Robot, 32-centimeter, 7-kilogram humanoid robot,who can understand 120 Languages and even speak 40+ Languages,being connected to speech recognizers from Google and Microsoft.Furhat is designed to interact with humans in a natural and engaging way, and is used in a variety of applications, including customer service, education, and healthcare.

If you want to know more about Furhat in Education, you can read the blog below:
https://furhatrobotics.com/blog/a-robot-in-every-classroom-furhats-vision-for-education/
The backstory behind the term "Furhat" increased my interest more. You may also read the story by following the link: https://furhatrobotics.com/blog/whats-in-a-name-the-story-behind-furhat-robotics/
Believe me, it's interesting.
Moving on in to small humanoid robot. The main difference between Semi-Humanoid and Small Humanoid Robots is the Physical characteristics. Semi-humanoid robots have a human-like upper body. They are designed for stationary use.But small humanoid robots are distinguished by their compact size, typically around 50cm in height, and are designed to have child-like appearance.

Small Humanoid Robots not only have human-like appearances. They resemble some characteristics as humans too. The robot named DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence-Open Platform) is used mainly for research and education purposes.We have all heard of League for Humans. You know, there is also RoboCup for Robots, where robots can showcase their abilities. Isn't that interesting?Humans were not directly involved in the game, but they are involved designing, building, and programming the robots. As DARwIn Robot is a open source platform, and developed mainly for Research and Education, anyone can program and develop the Software.The robots are controlled by their systems, which are programmed to interpret the game rules and make decisions about how to move and interact with the ball. The goal of the competition is to develop robots that can play soccer autonomously, without any human assistance. In 2012, the RoboCup took place in Mexico City, and Team DARwIn, won after defeating 24 other international teams.
And finally, best example for Semi-Humanoid Robot is NICO.This type of robot is normally between 50 and 150 centimetres tall, with NICO standing at 101 centimetres.While NICO's primary purpose is for research and neuro-cognitive modeling.Its ability to interact with humans through multimodal communication, including speech recognition, gestures, and facial expressions, it might be mostly useful in customer service , education and in healthcare too.
In short, Human Robot Interaction (HRI) is a field of study that focuses on the interaction between humans and robots. The goal of HRI is not to eliminate humans, but rather to create a world where robots and humans can work together to improve our lives.
Subscribe to my newsletter
Read articles from Stinu Rabin directly inside your inbox. Subscribe to the newsletter, and don't miss out.
Written by
Stinu Rabin
Stinu Rabin
In search of new skills!