Installation of ROS distro Melodic in Ubuntu 18.04
 Mayank Sharma
Mayank Sharma
ROS (Robot Operating System) Distro, short for "Distribution," refers to a specific release version of ROS. ROS is not a single software package but a collection of tools, libraries, and conventions for developing robotic software. These releases are named after animals in alphabetical order and are typically used to ensure compatibility and consistency across the ROS ecosystem.
Each distro introduces new features, improvements, and updates to existing packages. When working with ROS, it's essential to use the distro that is best suited for your project and ensures compatibility with the packages and libraries you intend to use.
To add public key for the ROS repository , you can add the ROS key to your system using the following commands:
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

This command fetches the missing key and adds it to your system. After that, you can try updating again:
sudo apt update
Now added the ROS repository to your system and make sure your Debian package index is up-to-date:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu bionic main" > /etc/apt/sources.list.d/ros-latest.list'
Desktop-Full Install: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception
install ros melodic using command:
sudo apt install ros-melodic-desktop-full

Desktop Install: ROS, rqt, rviz, and robot-generic libraries using command:
sudo apt install ros-melodic-desktop

To find that whether the ros melodic packages are installed or not:
apt search ros-melodic
Environment setup
It's convenient if the ROS environment variables are automatically added to your bash session every time a new shell is launched for this we have to add the source file in the hidden file of linux which is executed for every interval of time. This file is .bashrc.
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
If you just want to change the environment of your current shell and instead if you don't want to permanent then you have to execute the command manually
source /opt/ros/melodic/setup.bash
Dependencies for building packages
Up to now you have installed what you need to run the core ROS packages. To create and manage your own ROS workspaces, there are various tools and requirements that are distributed separately. For example, ros install is frequently used command-line tool that enables you to easily download many source trees for ROS packages with one command.
To install this tool and other dependencies for building ROS packages, run:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
Initialize rosdep
Before you can use many ROS tools, you will need to initialize rosdep. Rosdep enables you to easily install system dependencies for source you want to compile and is required to run some core components in ROS. If you have not yet installed rosdep, do so as follows.
sudo apt install python-rosdep
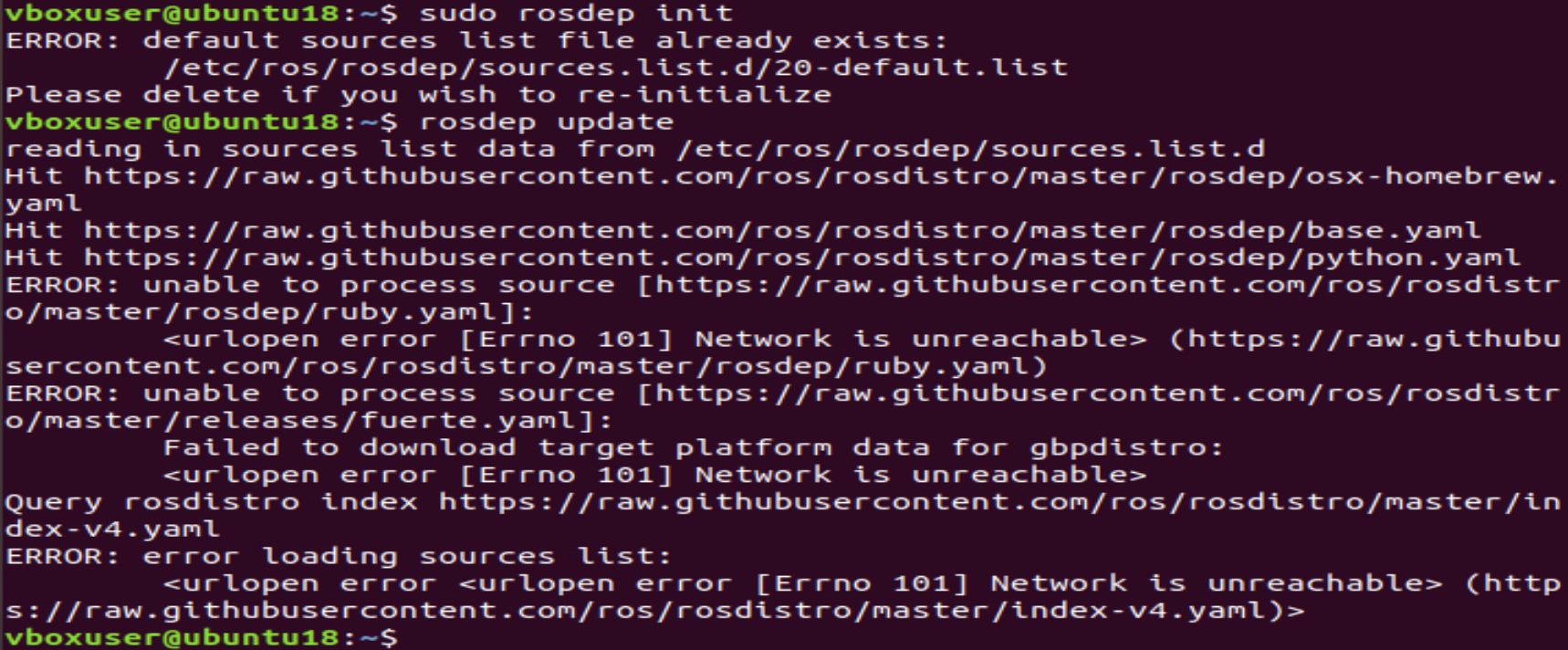
With the following, you can initialize rosdep.
sudo rosdep init
rosdep update
I hope you guys enjoys the blog do share and like it
want to connect with me 👇👇👇
My Contact Info:
📩Email:- mayank07082001@gmail.com
LinkedIn:- linkedin.com/in/mayank-sharma-devops
Subscribe to my newsletter
Read articles from Mayank Sharma directly inside your inbox. Subscribe to the newsletter, and don't miss out.
Written by
Mayank Sharma
Mayank Sharma
🔹🔹 Enter the world of Maya Hey everyone This is Mayank Sharma , a disciplined ,openminded ,enthusiastic & highly dedicated guy for achieving the excellence in life. For me learning is a never ending process, I believe in 𝐂𝐨𝐧𝐭𝐢𝐧𝐮𝐨𝐮𝐬 𝐋𝐞𝐚𝐫𝐧𝐢𝐧𝐠 & 𝐂𝐨𝐧𝐭𝐢𝐧𝐮𝐨𝐮𝐬 𝐃𝐞𝐯𝐞𝐥𝐨𝐩𝐦𝐞𝐧𝐭 . My goal is to be a successful Professional Engineer by hard work through my knowledge, skills & commitment which will help me grow, explore and excel along with a great team . With a natural curiosity and a talent for problem-solving, I am constantly exploring new ways to innovate the things and improve processes. Mail me 👉 mayank07082001@gmail.com 🔹🔹 I am persuing B.Tech in information technology with the specialisation of Artificial Intelligence and robotic from M.I.T.S Gwalior (M.P) . I'm passionate about learning cutting edge technologies & implement them to solve real world problems. I have devoted my time for them & gained experience in the following tools & technologies . 📌 𝐎𝐩𝐞𝐫𝐚𝐭𝐢𝐧𝐠 𝐒𝐲𝐬𝐭𝐞𝐦 : Wɪɴᴅᴏᴡs, CᴇɴᴛOS, RᴇᴅHᴀᴛ,Fedora,Ubuntu 📌 𝐋𝐚𝐧𝐠𝐮𝐚𝐠𝐞𝐬 : Pʏᴛʜᴏɴ, Sʜᴇʟʟ Sᴄʀɪᴘᴛɪɴɢ, c++, java 📌 𝐂𝐨𝐧𝐭𝐚𝐢𝐧𝐞𝐫 𝐄𝐧𝐠𝐢𝐧𝐞 : Dᴏᴄᴋᴇʀ, CRI-O, openshift 📌 𝐂𝐨𝐧𝐭𝐚𝐢𝐧𝐞𝐫 𝐌𝐚𝐧𝐚𝐠𝐞𝐦𝐞𝐧𝐭 𝐓𝐨𝐨𝐥𝐬 : Kᴜʙᴇʀɴᴇᴛᴇs 📌 𝐀𝐮𝐭𝐨𝐦𝐚𝐭𝐢𝐨𝐧 𝐓𝐨𝐨𝐥𝐬 : Aɴsɪʙʟᴇ, Gɪᴛ/GɪᴛHᴜʙ 📌 𝐂𝐥𝐨𝐮𝐝 𝐂𝐨𝐦𝐩𝐮𝐭𝐢𝐧𝐠 𝐏𝐥𝐚𝐭𝐟𝐨𝐫𝐦 : AWS(EC2,s3,EBs,vpc,loadbalancers,Autosg,rds,cloudwatch,route53, lamda , EFS, snapshot, serverless, EKS) 📌DATABASE : MongoDB, Mysql Also I have worked on Wᴇʙ Dᴇᴠᴇʟᴏᴘᴍᴇɴᴛ. I enjoy working on new ideas and helping others in these areas. 🔹🔹 Apart from being a technology enthusiast, travelling & photography has remained my constant passion. I always keep a right attitude & try to maintain positive vibe in every situation. I also spend time in playing Cricket & Football. Hence I understand the importance of team play & responsibility of a team player very well. Hobbies: ✨I am very interested in cyber security . whatever I see I try to find out the loopholes in it and then try to hack it or trying that how can i breach / break the security ✨ I love to see cricket (IPL) also very much interested in playing cricket . ✨I also love watching various tv and movie series, Top3 is Money heist, Gangs of wasseypur and comedy movies(like hera pheri) and college related webseries etc.