Craft a Powerful Reward Function in Student League
 Ansh Tanwar
Ansh Tanwar
Dominate the Student League of AWS DeepRacer Part-2
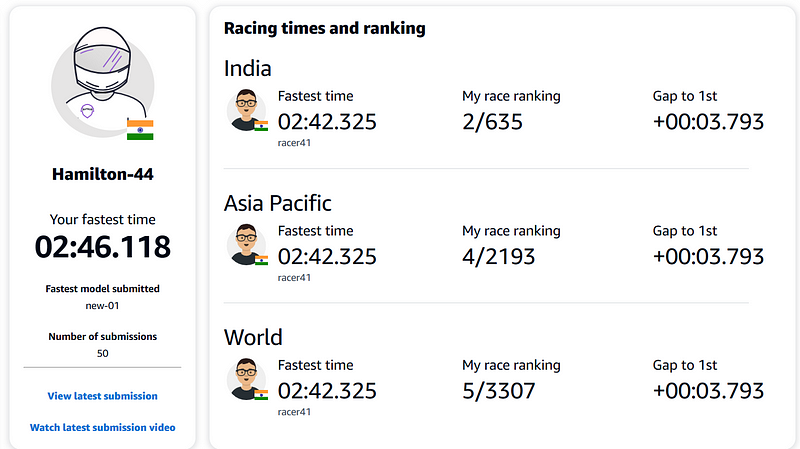
While most articles focus on virtual circuits, I’m here to simplify things for you in the student league and share some tips that I’ve gathered from the Discord community and other resources available online. These methods have helped me achieve an impressive top 8 rank in the previous season and a top 5 position Globally this season.🏁
Before crafting let’s look at all the parameters that can be used in the reward function
"all_wheels_on_track": Boolean, # flag to indicate if the agent is on the track
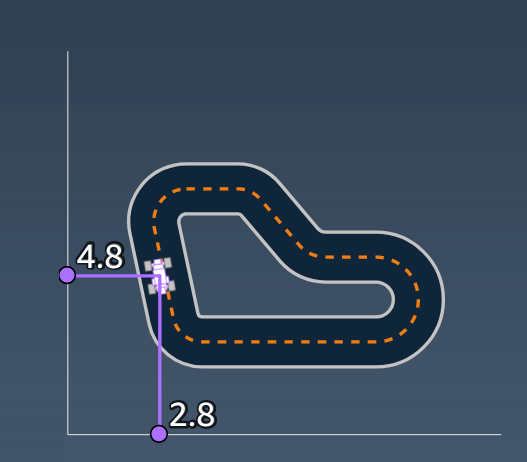
"x": float, # agent's x-coordinate in meters
"y": float, # agent's y-coordinate in meters
"closest_objects": [int, int], # zero-based indices of the two closest objects to the agent's current position of (x, y).
"closest_waypoints": [int, int], # indices of the two nearest waypoints.
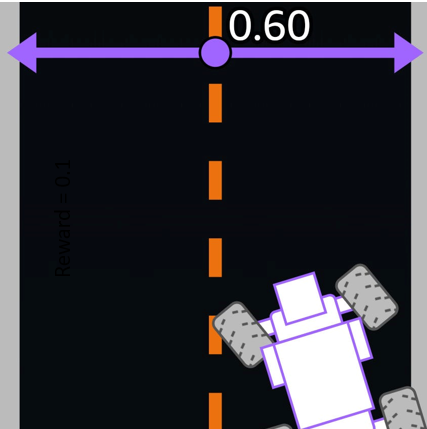
"distance_from_center": float, # distance in meters from the track center
"is_crashed": Boolean, # Boolean flag to indicate whether the agent has crashed.
"is_left_of_center": Boolean, # Flag to indicate if the agent is on the left side to the track center or not.
"is_offtrack": Boolean, # Boolean flag to indicate whether the agent has gone off track.
"is_reversed": Boolean, # flag to indicate if the agent is driving clockwise (True) or counter clockwise (False).
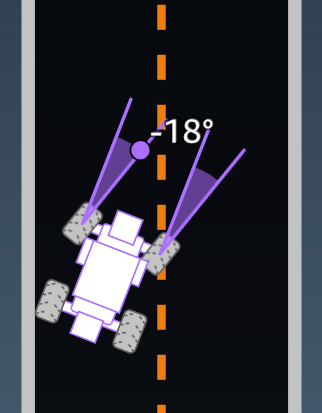
"heading": float, # agent's yaw in degrees
"objects_distance": [float, ], # list of the objects' distances in meters between 0 and track_length in relation to the starting line.
"objects_heading": [float, ], # list of the objects' headings in degrees between -180 and 180.
"objects_left_of_center": [Boolean, ], # list of Boolean flags indicating whether elements' objects are left of the center (True) or not (False).
"objects_location": [(float, float),], # list of object locations [(x,y), ...].
"objects_speed": [float, ], # list of the objects' speeds in meters per second.
"progress": float, # percentage of track completed
"speed": float, # agent's speed in meters per second (m/s)
"steering_angle": float, # agent's steering angle in degrees
"steps": int, # number steps completed
"track_length": float, # track length in meters.
"track_width": float, # width of the track
"waypoints": [(float, float), ] # list of (x,y) as milestones along the track center
}
To get a more detailed reference of the input parameters along with pictures and examples read this beautiful documentation.
link -> Input parameters of the AWS DeepRacer reward function — AWS DeepRacer (amazon.com)
First, I will walk you through one of the default reward functions provided by AWS and show you how to analyze, improve, and optimize it step by step. You will also discover some tips and tricks on how to increase the speed of your car and avoid common pitfalls. By the end of this article, you will have a solid understanding of how to design your own reward function and achieve top ranks in the AWS DeepRacer League. Let’s get started!😊
'''
Example 3: Prevent zig-zag in time trials
This example incentivizes the agent to follow the center line but penalizes
with lower reward if it steers too much, which helps prevent zig-zag behavior.
The agent learns to drive smoothly in the simulator and likely keeps
the same behavior when deployed to the physical vehicle.
'''
def reward_function(params):
'''
Example of penalize steering, which helps mitigate zig-zag behaviors
'''
# Read input parameters
distance_from_center = params['distance_from_center']
track_width = params['track_width']
abs_steering = abs(params['steering_angle']) # Only need the absolute steering angle
# Calculate 3 marks that are farther and father away from the center line
marker_1 = 0.1 * track_width
marker_2 = 0.25 * track_width
marker_3 = 0.5 * track_width
# Give higher reward if the car is closer to center line and vice versa
if distance_from_center <= marker_1: # REGION 1
distance_reward= 1.0
elif distance_from_center <= marker_2: # REGION 2
distance_reward= 0.5
elif distance_from_center <= marker_3: # REGION 3
distance_reward= 0.1
else:
distance_reward= 1e-3 # likely crashed/ close to off track
#never set negative or zero rewards
# Steering penality threshold, change the number based on your action space setting
ABS_STEERING_THRESHOLD = 15
# Penalize reward if the car is steering too much
if abs_steering > ABS_STEERING_THRESHOLD:
distance_reward*= 0.8
return float(reward)
In this we are calculating the distance from the center of the track and giving higher reward if the car is closer to center line.
marker_1is set to 10% of the track width .marker_2is set to 25% of the track width.marker_3is set to 50% of the track width.
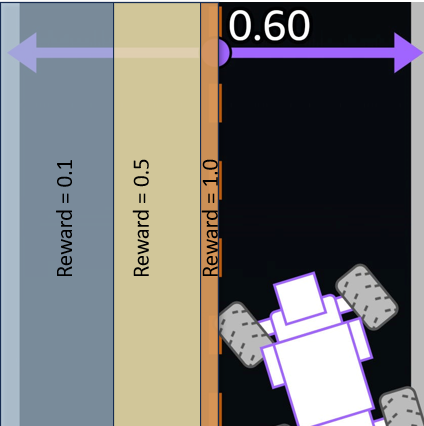
explains the different regions on the track and the rewards associated with them
we can experiment by varying marker length and reward values but lets think differently 🧠.
Lets give a continuous reward instead of discreate.
#continous reward
distance_reward = 1- (distance_from_center/track_width*0.5)
y= reward
x = distance from center , where 0.0 < x < 0.5 mlet’s take track_width = 1.0 m for simplicity.
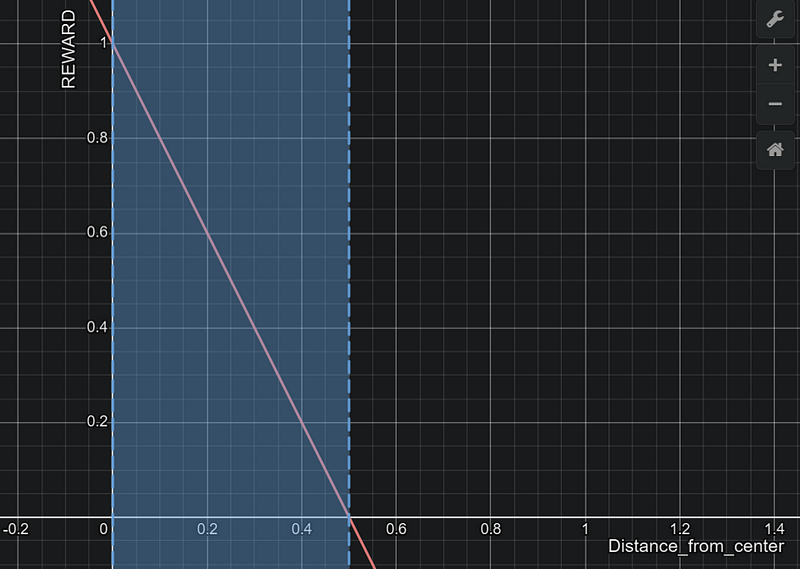
The reward function is a linear function of the distance from the center of the track. The closer the car is to the center, the higher the reward. The car gets zero reward if it goes off track (distance from center > 0.5 m).
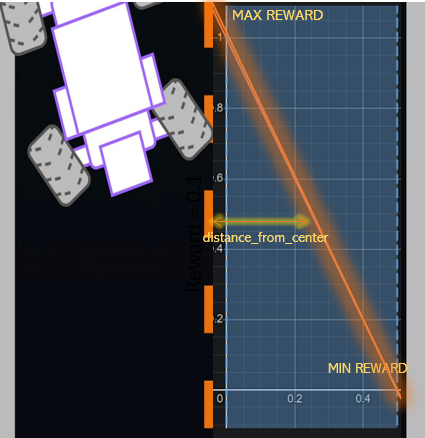
The image show’s how reward changes with different positions of car on the track.
A continuous reward offers fine-grained feedback, smooth learning, proportional rewards, gradient information, and customizability. These benefits contribute to more precise learning, improved convergence, and better performance of the reinforcement learning agent.
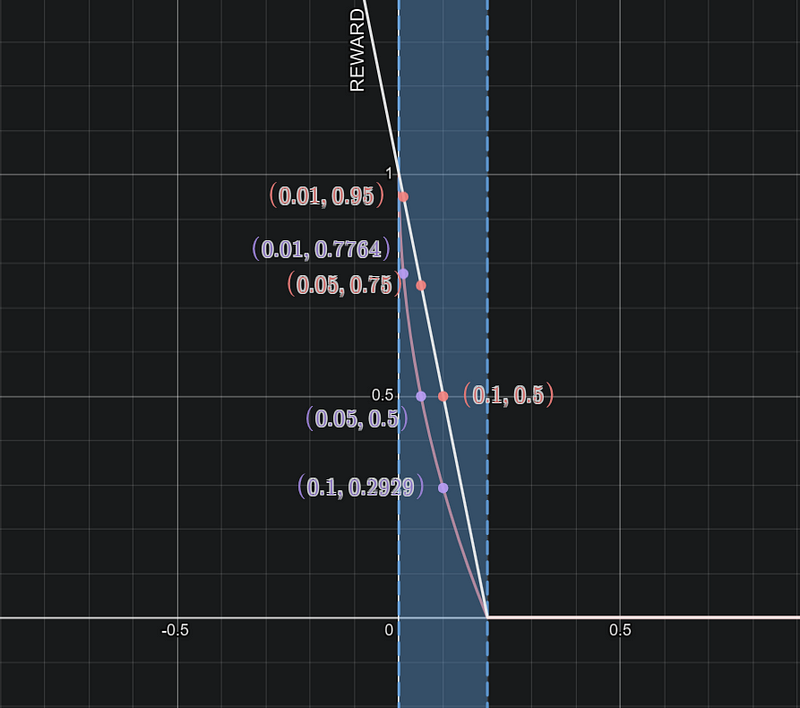
Now lets assume you want the car to stay more towards center but also give a gradual reward otherwise, so we can use an exponential function like this
distance_reward = 1- (distance_from_center/track_width*0.5)**0.4
#we haveraised to the power 0.4
#to make the curve more step lower the value
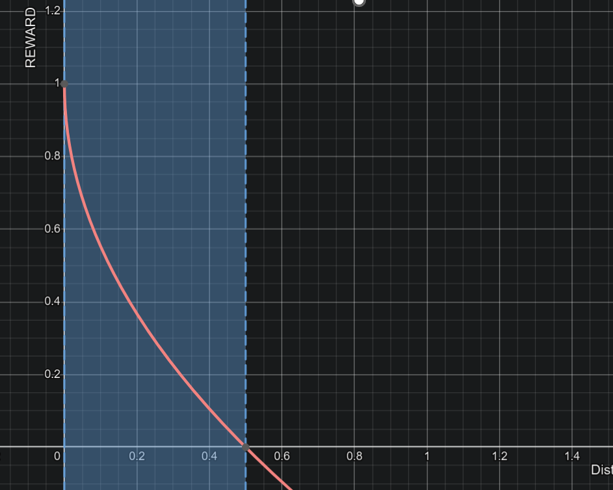
y = 1-(x/0.5)0.4
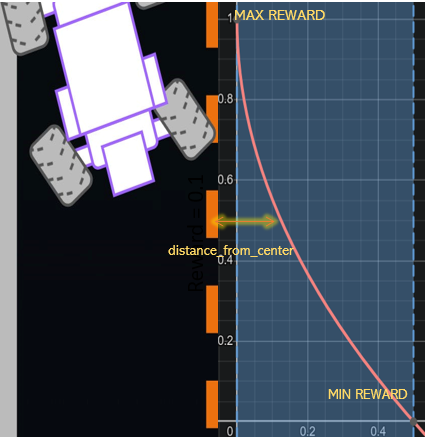
The value of our reward will vary between 0 — 1.0. Also we can scale the value of distance reward by seeing other parts of our complete reward function.
#Example
final_reward = distance_reward*2 + speed_reward*10 + ......
MAINTAINING SPEED OF 1 M/S
One of the key challenges in AWS DeepRacer is to maintain a speed of 1.0 m/s throughout the race. This can give you a significant advantage over your competitors and help you achieve better results.So lets dive deep to optimize our speed performance.
Even if I share my reward function with you, it will not work for you or your track. Each track requires different methods to maintain the speed. That’s why I want to share the method and ingredients that you will need to build your own.
Just using the speed parameter and rewarding the car for it will not do the work. Maintaining the speed requires careful and skillful building of the complete reward function, such that each of its subcomponents contributes towards maintaining the best speed overall.
def reward_function(params):
#############################################################################
'''
Example of using all_wheels_on_track and speed
'''
# Read input variables
all_wheels_on_track = params['all_wheels_on_track']
speed = params['speed']
# Set the speed threshold based your action space
SPEED_THRESHOLD = 1.0
if not all_wheels_on_track:
# Penalize if the car goes off track
reward = 1e-3
elif speed < SPEED_THRESHOLD:
# Penalize if the car goes too slow
reward = 0.5
else:
# High reward if the car stays on track and goes fast
reward = 1.0
return float(reward)
Look at this function in the documentaion Input parameters of the AWS DeepRacer reward function — AWS DeepRacer (amazon.com)
Lets reward and penalize our agent more.
if not all_wheels_on_track:
# Penalize if the car goes off track
reward = 1e-3 #never set negative or zero rewards
elif speed < SPEED_THRESHOLD:
# Penalize more
reward = 0.1
else:
# reward more
reward = 10.0
'''
The SPEED_THRESHOLD is fixed to 1.0.
This is the maximum speed of the car.
One thing we can try is to change the reward values.
Range to give the rewards [1e-3,1e+3]
keep the scale similar to other subcomponents in your function
The final reward in end can be normalized
'''
This can give a significant boost to our speed. You might be wondering why we aren’t giving continuous reward for speed too. If so, you are on the right track.
Lets explore continuous speed reward functions
speed_diff = abs(1.0-speed)
max_speed_diff = 0.2#set it carefully in range [0.01,0.3]
if speed_diff < maximum_speed_diff:
speed_reward = 1-(speed_diff/max_speed_diff)**1
else:
speed_reward = 0.001 #never set negative or zero rewards
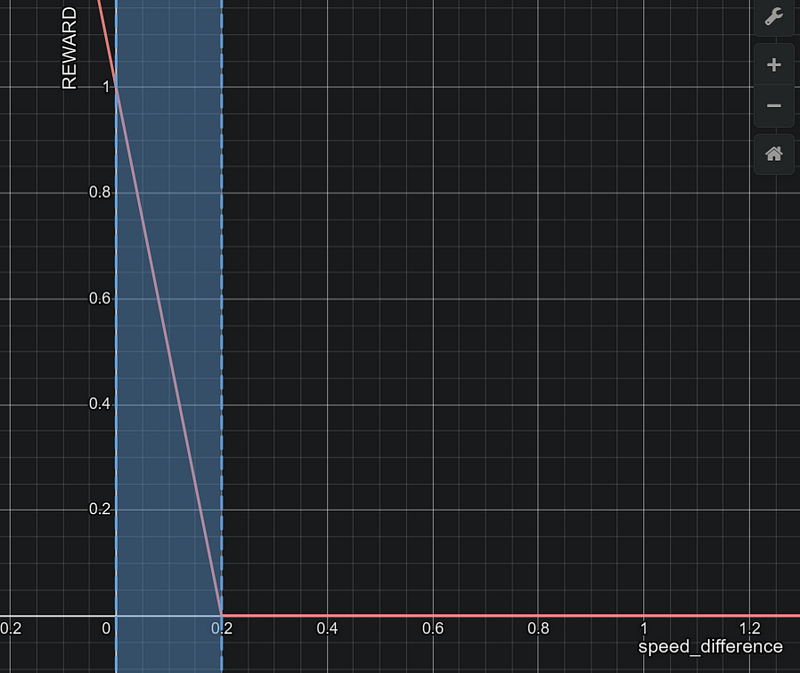
'''
lets assume max_speed_diff = 0.2
y=speed_reward
x=speed_difference 0<x<1.0
'''
speed_reward = 1-(speed_diff/max_speed_diff)**0.5
# changing the shape of the curve from linear to exponential helps a lot
Notice how much reward the agent gets for both the shapes/slopes for :-
speed difference (1.0 — speed of car) = 0.1, 0.05 and 0.01 i.e.
speed of car = 0.9 and 0.95 m/s and 0.99m/s
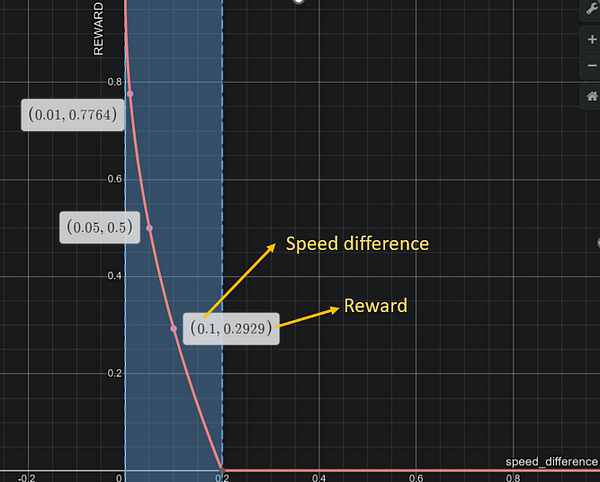
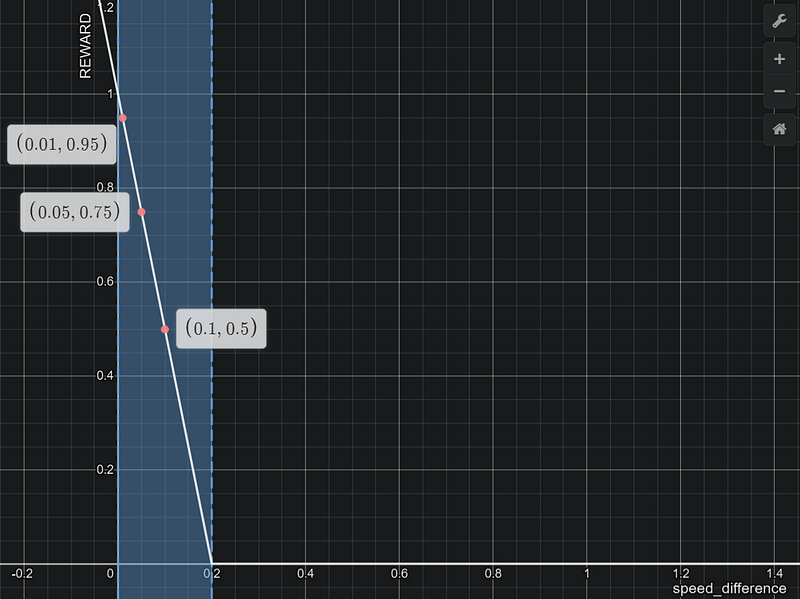
For less speed you get lesser rewards and as you progress higher in speed i.e., closer to 1m/s, the reward increases exponentially high, which motivates the agent to maintain high speed.
Another way to modify the above reward function is to use max() because we are not using any if condition and we don’t want our reward to go below 0.001.
max_speed_diff = 0.2
speed_diff = abs(1.0-speed)
speed_reward = max(1e-3, 1-((speed_diff/max_speed_diff)**0.5 ))
Steps and Progress components are also very important to maintain that 1 m/s speed
let's look at the example given in documentation.
def reward_function(params):
#############################################################################
'''
Example of using steps and progress
'''
# Read input variable
steps = params['steps']
progress = params['progress']
# Total num of steps we want the car to finish the lap, it will vary depends on the track length
TOTAL_NUM_STEPS = 300
# Initialize the reward with typical value
reward = 1.0
# Give additional reward if the car pass every 100 steps faster than expected
if (steps % 100) == 0 and progress > (steps / TOTAL_NUM_STEPS) * 100 :
reward += 10.0
return float(reward)
This function can also be modified and improved in various ways, but the one presented above works very well if accompanied by other subcomponents like speed, distance, etc. But how do we combine them to make a single reward function? Here, your knowledge and concepts of reinforcement learning and mathematics play a crucial role. Let me explain to you one of such simple techniques that might work for you.
The Recipe
'''
-> Dont set a global variable for reward value
instead set different rewards for each part paramter - speed_reward, steps_reward etc
-> Keep the scale for each reward part same, normalizing them helps sometimes
-> Simply adding them together in final_reward variable usually works
-> you can experiment with a lot of methods here, I will strongly
recommend to watch youtube video- https://www.youtube.com/watch?v=vnz579lSGto&ab_channel=BoltronRacingTeam
'''
SUMMARY
In this article, you have learned how to craft a powerful reward function for AWS DeepRacer in Student League. You have learned what AWS DeepRacer is, what a reward function is, and how to design and improve your own reward function using different methods and subcomponents. Remember this is just a starting point and you can go a way deeper inside the deepracer . Keep reading more articles on medium and following more resources.
I hope you found this article helpful and informative.
Must Visit :
Best reward function shapes for success! — YouTube
Input parameters of the AWS DeepRacer reward function — AWS DeepRacer (amazon.com)
Parameters In Depth: DeepRacer Student League Guide | by Aleksander Berezowski | Medium
Results and Lessons: DeepRacer Student League March 2023 | by Aleksander Berezowski | Medium
If you have any doubt do ask in comment section.Also, don’t forget to follow me for more articles on AWS DeepRacer and other topics related to machine learning and data science.Thank you for reading and happy racing!😊
Subscribe to my newsletter
Read articles from Ansh Tanwar directly inside your inbox. Subscribe to the newsletter, and don't miss out.
Written by
Ansh Tanwar
Ansh Tanwar
I am a data science enthusiast. I have worked on various ML/DL projects.