Building an Aerial Crop Monitoring System with Raspberry Pi, NoIR Picamera and u-blox GPS: A Guide to DIY Precision Agriculture
 Elisha Bere
Elisha Bere
In precision agriculture, monitoring crop health from an aerial perspective is invaluable. This project walks through building a compact aerial crop monitoring system using a Raspberry Pi Zero 2 W, u-blox NEO-6M GPS module, and NoIR Picamera. With this setup, we'll capture GPS-tagged multispectral images to analyze crop stress, focusing on the red band data to detect potential vegetation issues.
This guide covers hardware setup, configuring serial communication on the Raspberry Pi, connecting the GPS module, and using basic Python code to retrieve GPS coordinates. Along the way, I'll share the challenges I faced in integrating the GPS module, configuring ttyAMA0 for serial communication, and building a stable power supply.
Hardware Setup
To achieve a lightweight, reliable aerial setup, here’s the equipment I used:
Raspberry Pi Zero 2 W
u-blox NEO-6M GPS Module
NoIR Picamera (for near-infrared imaging)
Custom Power Supply (ensures stable power during flight)
Stable drone to attach the setup on
Challenges and Solutions
Finding Reliable Information: Many sources were outdated or incomplete regarding u-blox GPS setup with the Raspberry Pi Zero 2 W.
Powering the Setup: The drone requires stable voltage; I built a power supply circuit with regulated outputs to meet both the Pi and GPS module requirements.
Serial Communication Configuration: Configuring the Raspberry Pi's
ttyAMA0for serial communication involved troubleshooting permissions and UART conflicts.
Step 1: Setting Up the u-blox NEO-6M GPS Module with Raspberry Pi
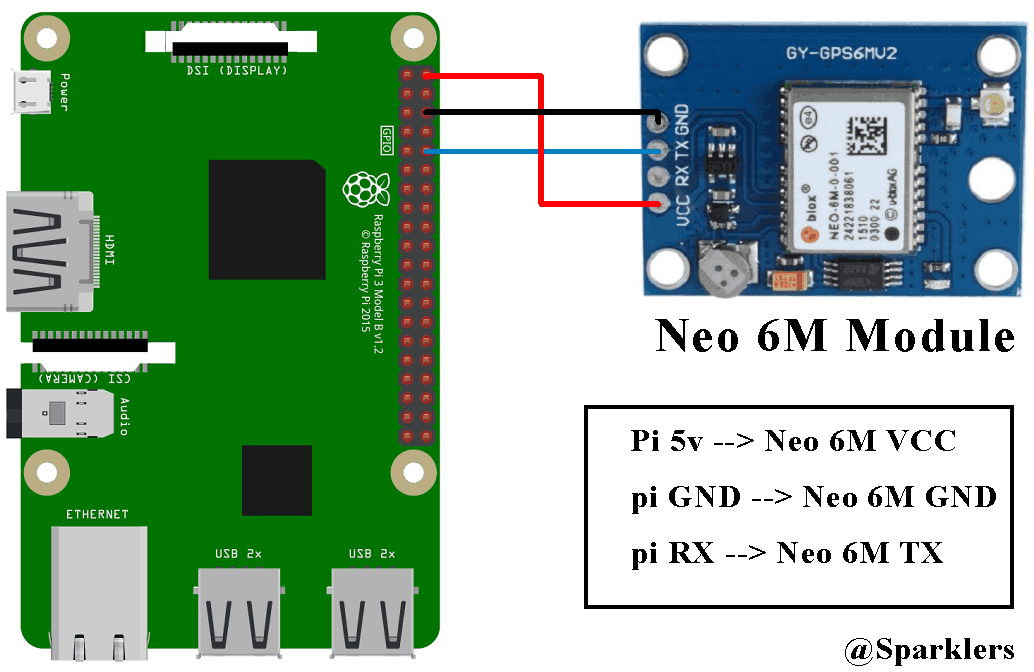
The u-blox NEO-6M GPS module communicates over serial. First, we need to connect the GPS module to the Raspberry Pi:
Connections:
Connect GPS TX to Raspberry Pi RX (GPIO15).
Connect GPS RX to Raspberry Pi TX (GPIO14). (not needed for reading)
Connect Ground and Power (3.3V) as needed.
Enable Serial Communication:
Open the Raspberry Pi configuration file to enable the serial interface.
sudo raspi-configNavigate to Interfacing Options > Serial.
Disable the login shell over serial, then enable the serial interface.
Configure
ttyAMA0for GPS Serial Communication:Edit the
/boot/config.txtfile to configure the UART:sudo nano /boot/firmware/config.txtAdd the following lines:
enable_uart=1 dtoverlay=disable-btReboot the Raspberry Pi to apply changes.
Step 2: Basic Code to Access GPS Data
With the GPS connected and the serial port configured, we can use Python to read NMEA sentences from the GPS and extract location data.
Script: Reading GPS Coordinates in Python
Install Required Libraries:
Install
pyserialandpynmea2to communicate with the GPS module and parse NMEA sentences:pip install pyserial pynmea2
Python Script for GPS Data Retrieval:
import serial import pynmea2 # Initialize the serial connection to the GPS module serial_port = "/dev/ttyAMA0" # Port for GPS baud_rate = 9600 # Default GPS baud rate def get_gps_data(): try: # Open serial port with serial.Serial(serial_port, baud_rate, timeout=1) as ser: while True: line = ser.readline().decode('ascii', errors='replace') # Check for GPRMC sentence (contains position and time) if line.startswith('$GPRMC'): try: msg = pynmea2.parse(line) if msg.status == 'A': # Ensure it's a valid fix print(f"Latitude: {msg.latitude}, Longitude: {msg.longitude}") return msg.latitude, msg.longitude else: print("Waiting for valid GPS fix...") except pynmea2.ParseError as e: print(f"Parse error: {e}") except serial.SerialException as e: print(f"Serial error: {e}") if __name__ == "__main__": latitude, longitude = get_gps_data() print(f"Current Location: {latitude}, {longitude}")
This script establishes a serial connection to the GPS module, reads NMEA sentences, and parses the $GPRMC sentence to retrieve the latitude and longitude.
Step 3: Capturing GPS-Tagged Images with the NoIR Picamera
To complete the crop monitoring setup, the NoIR Picamera captures images, and GPS metadata is embedded directly into each image file. Here’s a simplified script for capturing images with GPS metadata:
Install GPSPhoto for Metadata Tagging:
Use
gpsphototo embed GPS coordinates in image files:pip install GPSPhoto
Python Script for Capturing GPS-Tagged Images:
from picamera2 import Picamera2 from GPSPhoto import gpsphoto import time def capture_image_with_gps(lat, lng): camera = Picamera2() camera.configure(camera.create_still_configuration()) camera.start() time.sleep(2) # Allow time for auto-adjustment timestamp = time.strftime('%Y%m%d_%H%M%S') image_path = f"image_{timestamp}.jpg" camera.capture_file(image_path) camera.stop() # Embed GPS data into the image photo = gpsphoto.GPSPhoto(image_path) info = gpsphoto.GPSInfo((lat, lng), timeStamp=time.strftime('%Y:%m:%d %H:%M:%S')) photo.modGPSData(info, image_path) print(f"Captured image with GPS data at {image_path}") # Example usage lat, lng = get_gps_data() # Fetch GPS coordinates capture_image_with_gps(lat, lng)
This script configures the NoIR Picamera, captures an image, and embeds the current GPS coordinates as metadata.
Step 4: Using Multispectral Data for Crop Health Analysis
The NoIR Picamera is ideal for capturing near-infrared (NIR) data, essential for analyzing crop health. By focusing on the red band, we can detect vegetation stress from aerial imagery. Healthier vegetation reflects more NIR light, while stressed vegetation reflects less.
Conclusion
Creating an aerial crop monitoring system with the Raspberry Pi, NoIR Picamera, and u-blox GPS is more than just a tech project—it’s a step toward transforming how we care for our crops and use technology in agriculture. With just a lightweight board, some affordable components, and a bit of perseverance, we can gain a bird’s-eye view into crop health and stress indicators, giving farmers critical insights that were once only accessible through costly and complex systems.
This DIY setup invites a world of possibilities. Imagine your drone gently buzzing over fields, autonomously capturing images that reveal vital data about crop conditions, and doing so with a tool that you built yourself. This project’s blend of hardware, software, and aerial innovation makes it a powerful tool not only for agriculture but for anyone passionate about using technology to solve real-world challenges.
In a world where sustainability and efficiency are essential, this system can be a game-changer—pioneering a new way to make agriculture smarter, greener, and more resilient. So why not get started? Build, test, fly, and let your crops—and your imagination—thrive.
Subscribe to my newsletter
Read articles from Elisha Bere directly inside your inbox. Subscribe to the newsletter, and don't miss out.
Written by
Elisha Bere
Elisha Bere
I am a Front-End Developer & ICT Researcher from Zimbabwe with a passion for secure, user-friendly, and creating intuitive, and dynamic user experiences.