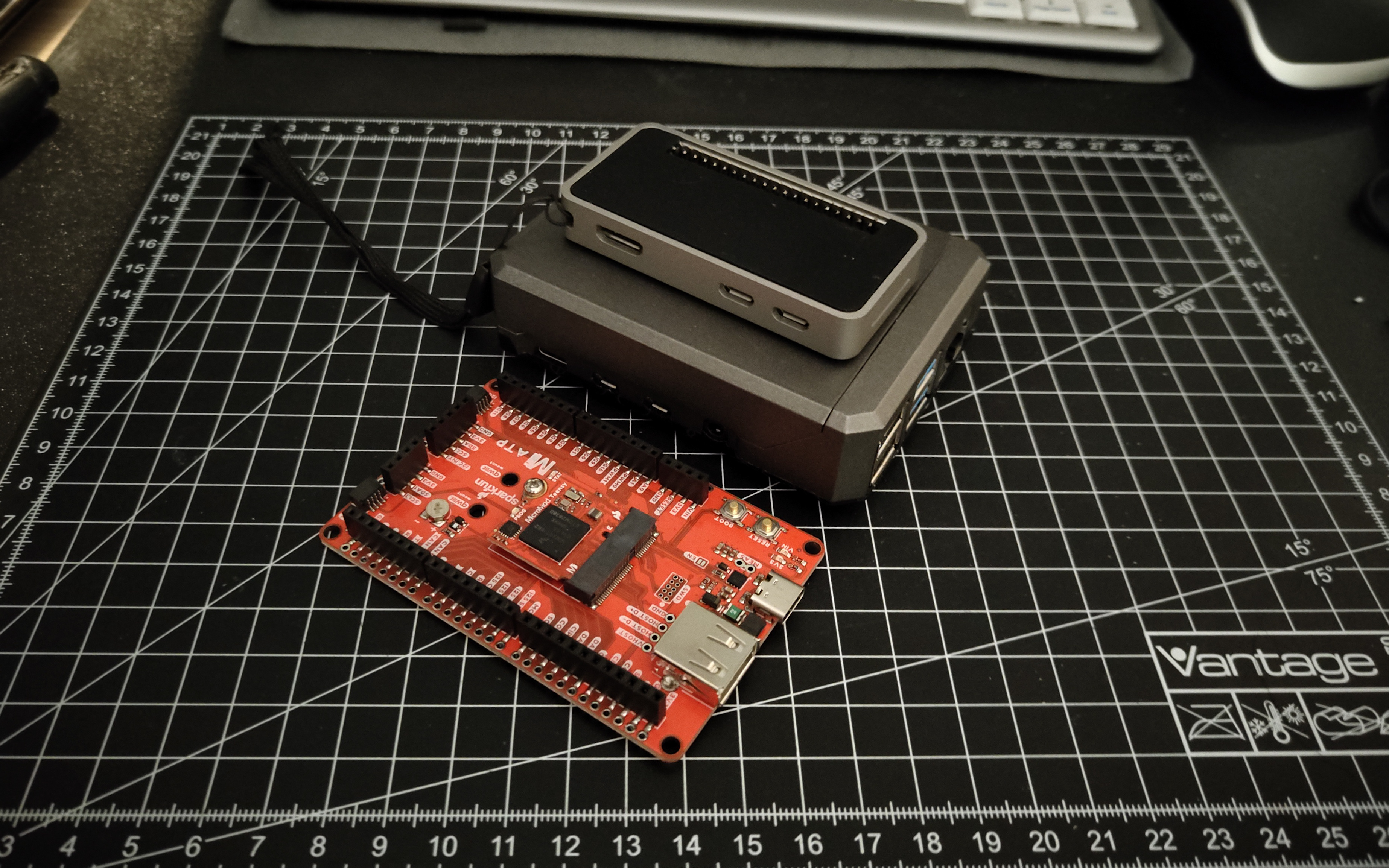
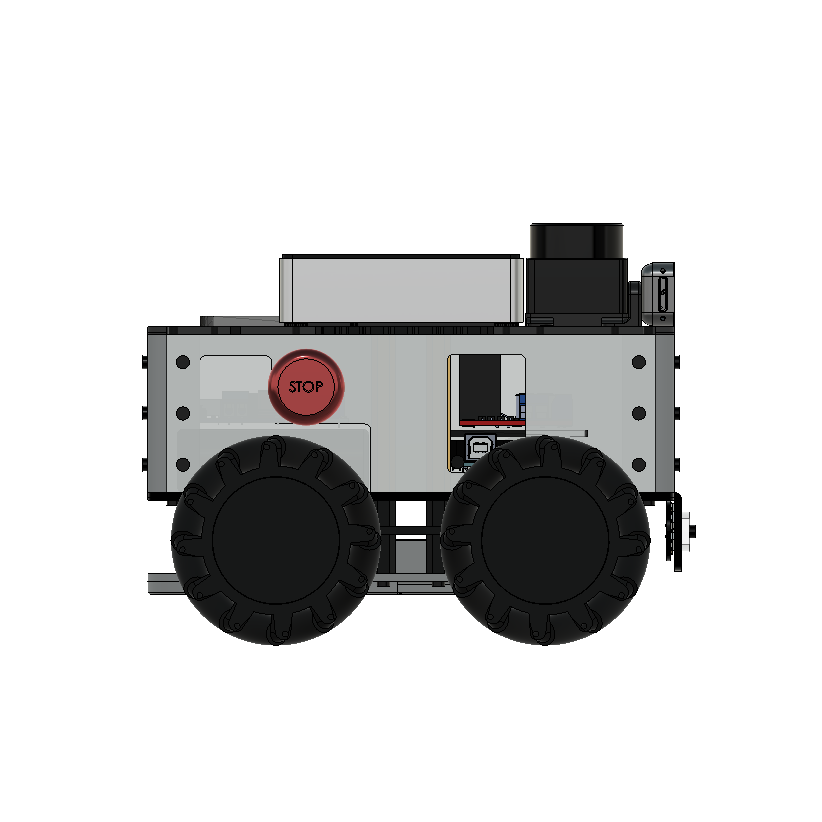
This week, I was supposed to be implementing the Parameter Server on micro-ROS, but I decided to put that aside for a while and work on updating the robot description instead. I made some hardware changes since moving to ROS 2 (new RPi 4 case, change...